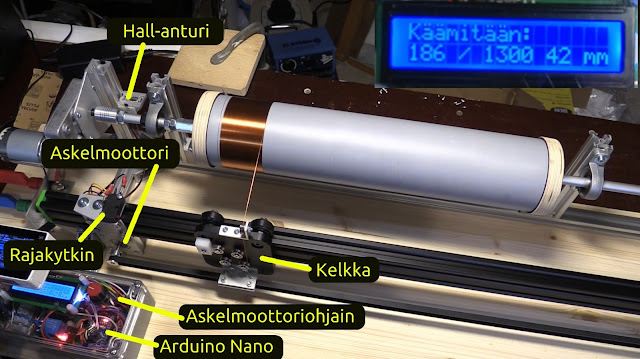
Mitä ei saa kaupasta, se pitää rakentaa itse. Kuten nyt vaikkapa teslamuuntajan toision käämintakone. Sellainen on aina hyvä olla olemassa. Arduino Nano on C++ -kielellä ohjelmoitava mikrokontrolleri , joka soveltuu tähän projektiin täydellisesti. Sillä voi ohjata niin LCD-näyttöä, askelmoottoriohjainta kuin relettäkin, joita tarvitaan tässä projektissa. Lisäksi vähän mekaanisia osia, askelmoottori , johde, langankiristin, käämintämoottori, pari laakeria, yms. Arduino tarkkailee akselin pyörimistä Hall-anturin avulla ja siirtää kelkkaa joka kierroksella valitun nousun verran. Tässä ensimmäisessä koeajossa käämimme 1300 kierrosta 0,2 mm lankaa. Nousuksi valitaan 0,23 mm koska nimellismitta 0,2 mm on kuparin paksuus johon päällä oleva eristelakka lisää paksuutta hieman. Mikrometrillä mitattuna 0,23 mm vaikutti sopivalta arvolta, jolla lanka käämiytyy vieri viereen. Koneella olisi mahdollista myös jättää haluttu ilmaväli kierrosten väliin, joka käsin käämimällä on mahdotonta...




Kommentit
Lähetä kommentti