I built a staccato controller for a vacuum tube Tesla coil using a microcontroller. I used an Arduino Nano , which is an older (2008) and well-known microcontroller based on the Atmega328 . It's relatively slow compared to many newer microcontrollers, but still fast enough to follow the 50-hertz frequency of the mains power, which is the basis of the staccato controller's operation. View in CircuitLab . In the circuit diagram, at the bottom right, there is a transformer, 230/12 V 6 VA. I initially used a 2 VA printed circuit board transformer, but it had a tendency to overheat. A 4 VA transformer would likely be fine, but I installed a 6 VA transformer . Above the transformer, there is a full-wave rectifier , BR1. Following the bridge is an electrolytic capacitor C1, rated at 1000 uF and 35 V. After that, there is a 7812 voltage regulator that steps the voltage down to 12 volts, which is the highest allowed operating voltage for the Nano. Even though the rated voltage of the tr...
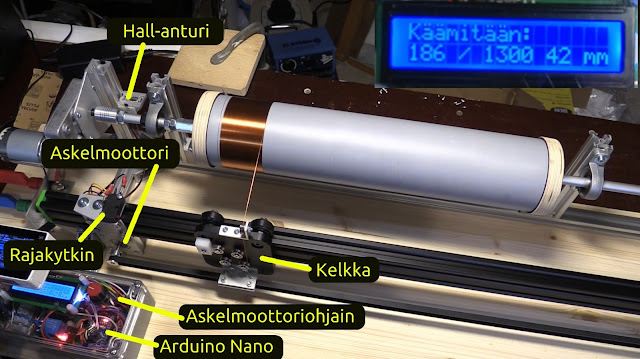
Mitä ei saa kaupasta, se pitää rakentaa itse. Kuten nyt vaikkapa teslamuuntajan toision käämintakone. Sellainen on aina hyvä olla olemassa. Arduino Nano on C++ -kielellä ohjelmoitava mikrokontrolleri , joka soveltuu tähän projektiin täydellisesti. Sillä voi ohjata niin LCD-näyttöä, askelmoottoriohjainta kuin relettäkin, joita tarvitaan tässä projektissa. Lisäksi vähän mekaanisia osia, askelmoottori , johde, langankiristin, käämintämoottori, pari laakeria, yms. Arduino tarkkailee akselin pyörimistä Hall-anturin avulla ja siirtää kelkkaa joka kierroksella valitun nousun verran. Tässä ensimmäisessä koeajossa käämimme 1300 kierrosta 0,2 mm lankaa. Nousuksi valitaan 0,23 mm koska nimellismitta 0,2 mm on kuparin paksuus johon päällä oleva eristelakka lisää paksuutta hieman. Mikrometrillä mitattuna 0,23 mm vaikutti sopivalta arvolta, jolla lanka käämiytyy vieri viereen. Koneella olisi mahdollista myös jättää haluttu ilmaväli kierrosten väliin, joka käsin käämimällä on mahdotonta...
Joulupukki toi Kiinasta teslamuuntajan rakennussarjan . Tämä yhdellä IRFP260 mosfetillä varustettu pieni muuntaja osaa myös moduloida ääntä resonanssitaajuuden sekaan. Pari iltaa tuli pojan kanssa vietettyä sitä kasatessa. Tässä lyhyt projektikuvaus. Mukana ei tullut mitään rakennusohjeita, joskin piirilevyssä oli hyvät komponenttimerkinnät kyllä. Ne eivät tosin täsmänneet komponenttien kanssa. Levyssä oli paikat neljälle vastukselle, 2 kpl 10 kΩ ja 2 kpl 4,7 kΩ, mutta mukana oli vastukset 2 kpl 10 kΩ 2 kpl 6,8 kΩ. Onko suunnitelma muuttunut piirilevyn valmistuksen jälkeen, vai oliko mukana väärät vastukset? Kotoa löytyi kyllä 2 kpl 5,6 kΩ vastuksia, jotka olisivat olleet lähempänä piirilevymerkintöjen arvoja, mutta päätettiin kuitenkin käyttää mukana tulleet. Ja mihin toisiokäämin alapää liitetään? Entä yksi ylimääräinen 150 pF kerko, jolle ei löytynyt paikkaa mistään? Parin illan juottamisen ja ihmettelyn jälkeen laite oli kuitenkin valmis, eikä osia jäänyt kovin paljon y...






Kommentit
Lähetä kommentti