Protosta valmiiksi laitteeksi
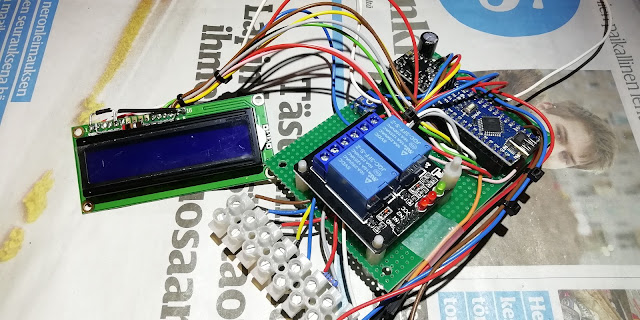
Kun kytkentä on koekytkentäalustalla todettu toimivaksi, on aika rakentaa siitä valmis sovellus. Yhden tai muutaman kappaleen rakentaa kätevästi koekytkentälevylle. Arduino Nano ja askelmoottoriohjeimet ovat kiinni kannassa, jolloin ne voi tarvittaessa irrottaa. Nestekidenäyttö on suoraan puihoilla kiiinni levyssä, Arduinon pinnit riittivät, mutta I2C-väylä olisi vaihtoehtona, jos pinnit loppuvat kesken. Se tarvitsee vain kaksi digitaalipinniä Ardionolta kun tämä suora kytkentä tarvitsee kuusi. Ulkoiset osat, askelmoottori, Hall-anturi ja rajakytkin liitetään riviliittimellä, joka on langoitettu Arduinolle ja askelmoottoriohjaimelle. Relekortilla on riviliitin valmiina. Puuttuu vielä kaikenlaista mekaanista osaa, kotelo, painonappi, valitapotikka ja jänniteragulaattori. Askelmoottori tarvitsee 24V, joten ulkoisena powerina on 24V hakkuri. Siitä pitää pudottaa logiikalle 5V käyttöjännite. Sen voi tehdä regulaattorilla joko suoraan viiteen volttiin, tai kahdeksaan, jollo...